낮은 완화 안정화는 강철 스트랜드 장비 기술 제안서를 압축응력을 주었습니다
1. 주요 기술 상술
| 제품 상술(MM) |
Φ17.8,Φ15.7,Φ15.24,Φ12.7,Φ11.1,Φ9.53 |
| 강도 레벨 |
1860MPa |
| 계획된 속도 |
120m/min |
| 평가 속도 |
110m/min |
2. 연례 출력 표
| 가닥 ø |
지역 |
장력입니다
힘
|
중량 |
피치 |
속도 |
당기기 |
생산 |
| 밀리미터 |
mm2 |
MPa |
킬로그램 / M |
밀리미터 |
분 M / |
나트 |
킬로그램 / H |
T/month |
T / 년 |
| 9.53 |
55 |
1860 |
0.43 |
133 |
79.8 |
48 |
2399 |
978 |
11735 |
| 11.1 |
74.2 |
0.582 |
155.4 |
93 |
62 |
3527 |
1542 |
18511 |
| 12.7 |
98.7 |
0.775 |
178 |
106 |
83 |
4929 |
2340 |
28095 |
| 15.24 |
140 |
1.115 |
213 |
120 |
118 |
8028 |
3813 |
45759 |
| 17.8 |
191 |
1.5 |
250 |
70 |
160 |
6300 |
2992 |
35910 |
| 24개 H / 0 일째 일 / 달 |
|
3. 주요 부문
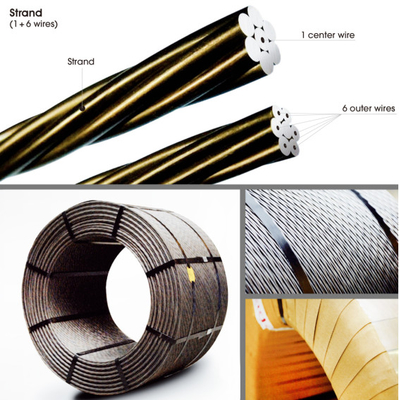
3.1 스트랜더 6 + 1 모델 JXN1250을 건너 뛰세요
트위스터의 속도
회전은 600 RPM을 가속시킵니다
M / 분 최대 속도 (1×7strand) 120
피치 (1x7 가닥) 14 K
3.1. 스풀 프레임
H-휠 6의 수
플랜지 직경 1250 밀리미터
롤 직경 500 밀리미터
경폭 840 밀리미터
전폭 964 밀리미터
보어 지름 120 밀리미터
최대 적재량 3.500Kg
독립적 페이-오프
비 랙
C . 드라이브
D. 받침대
E. 활
F. 주택
G. 와이어 금형 성형
H. 정수 단위 뒤에
3.2 캡스턴을 당기는 퍼스트그룹
지름 2000 밀리미터
맥스. 연속적인 당기기 16000 킬로그램
맥스. 120 M / 분 생산 속도
맥스. 신장 5%
원동력 280 kw
끊임없이 계속되는 동작 속도 960 rpm
정전력 900 - 1500 rpm
모터 열 보호, ABB 벡터 제어 주파수 변환기.
A. 인장휠
비. 기어 박스.
C. 제어 시스템
D. 브레이크계통
E. 가닥 클램프를 누르는 와인딩 라인
3.3 압력 센서
온라인 긴장 측정 장치 바퀴 직경은 800 밀리미터이고, 시스템이 첫번째 인장휠의 뒤쪽에 위치하고 유도로의 앞에서, 이 시스템을 사용하는 것 안정된 일정한 장력조종을 실현하기 위해 2개 인장휠 단위를 보증할 수 있고, 실시간 데이타를 모니터링하고 드러낼 수 있습니다.
3.4 중주파유도로
유도로 :발전 600KW, 최대 용량 : 가닥을 위한 냉각을 포함하여, 9000 Kg / 시간.
평가된 전원 600 KW
평가된 주파수 6000 HZ
정류 입력 전압 380V(50Hz)
DC 정격 전압 500 V
DC 정격 전류 1200A
출력 전력 범위 10%--100%
온도 370-420' C
3.5 얼음물 배쓰
냉각 수조는 9 미터 긴, 사용 물 분무에 대한 것이고 자동 냉각 수온 제어 시스템으로 4개 세트, 열풍 송풍기와 마른 장치를 붑니다.
냉각수 순환량 25m3/hour
32' C 하에 냉각 수온
수압 3 바
압축 공기 압력 5 바
건조 공기 플로우 250 Nm3/h
3.6 두번째 인장휠 유닛
두번째 인장휠 유닛은 권취 장력을 발생시키기 위해 첫번째 인장휠과 협력합니다.
지름 2000 밀리미터
맥스. 상수는 16000 Kg를 팽팽하게 합니다
맥스. 120 M / 분 생산 속도
맥스. 신장 5%
280 kw를 강화하세요
회전된 속도 960 rpm
회전된 속도 900-1500 rpm의 범위
뜨거운 보호 스위치
ABB 벡터 제어 주파수 컨버테르알비비
3.7 JXN90-5 동기장치
2개 롤러가 신크로니싱 유닛에 있, 하나는 신크로니싱 입지에 있습니다, 다른 것 댄스 팔에 있습니다. 공압 계통은 손으로 조정될 수 있는 반대이고 앞으로 압력을 제공합니다. 다른 신크로니싱 긴장은 다른 스트랜드 직경에 의해 이루어질 수 있습니다. 한 셋트 위치 센서는 감기스풀의 인버터에 댄스 팔의 위치를 피드백하고,에 관한 속도를 조절하고,에게 센터에 있는 댄스 팔의 일을 확인합니다.
3.8 CPJXN125A-11A 테이크-업 / 페이-오프 유닛
2 고정 보빈의 차원
외경 2800 밀리미터
내경 1200 밀리미터
폭 1500 밀리미터
3.8.2 맥스 부하 중량 : 2
3.9 JXN90-5 신크로니싱 유닛
2개 롤러, 하나가 신크로니싱 입지에 있습니다, 다른 것 댄스 팔에 있습니다. 공압 계통은 반대이고 전방 압력을 제공합니다,
그것이 손으로 조정될 수 있습니다. 다른 신크로니싱 긴장은 다른 스트랜드 직경에 의해 이루어질 수 있습니다. 한 셋트 위치 센서는 감기스풀의 인버터에 댄스 팔의 위치를 피드백하고,에 관한 속도를 조절하고,에게 센터에 댄스 팔의 일을 확인합니다.
3.10 정확성 권상기 : JXN90-6
스트랜드 직경은 9.53- 17.8 밀리미터를 울렸습니다
정확성 와인딩 가닥 직경 범위 9.53-17.8mm
내경 800 밀리미터
플랜지 외경 1650 밀리미터
폭 750 밀리미터
맥스. 로드 4.500Kg
홈 수 8
맥스. 스풀링 힘 600Kg
피치 9 -18mm을 가로지르세요
우리가 다음과 같은 스페치피션에 따라 이끄는 템플릿의 5개 세트를 공급하는 가닥 안내 템플릿 : Φ15.7,Φ15.24,Φ12.7,Φ11.1,Φ9.53.
맥스. 속도 300m/min
권선 모터
정토르크 /에 동력 45 kW와 정전력으로 일하면서, 권선 모터 AC 메인 모터는 단일의 팬에 의해 냉각됩니다
다음에 의해 통제됩니다 : ABB 벡터 제어 컨버터.
횡행 모터
정전력 1.5 kW에서 일하는 모터를 가로지르세요
ABB 벡터 제어 컨버터에 의해 제어된 열 보호
운전하고 PC 연안선을 위해 제어되세요
4.1 제어 시스템은 제어 캐비넷을 포함합니다. 보호 수준은 IP23입니다.
4.2 상자는 회색빛인 두배 사이드 캐비넷, 색칠한 컬러 RAL 7032입니다
4.3 양과 차원은 공급자에 의해 주어질 것입니다 ..
4.4 ABB 주파수 변환기
4.5 냉각 시스템은 팬들과 휠터 망으로 구성됩니다. 캐비닛은 한계에 이르는 피조화실에 위치하여야 합니다. 30' C - 40%보다 낮은 습도보다 낮은 온도
주요 권력과 제어 시스템의 주입구는 제어 캐비넷의 바닥으로부터 들어갑니다.
4.6 소격실 GB Standards4.7은 다음으로 구성됩니다 :
퓨즈와 주차단기
ABB 컨버터
보조 루프
4.8 전원 공급기
전원 공급기 : 3상 380V 50HZ
전원 공급기 : 단일 상 220V 50HZ